企业免费推广平台

上海劲容自动化设备有限公司气管吸吊机|助力机械手|真空吊具|轨道交通
138****4765
所述蜗杆的底端贯穿安装板的顶壁并延伸至转槽内,所述蜗杆的底端安装在限位板的顶壁上。地,所述固定夹板的顶壁上同样开设有转槽,所述转槽内同样设有限位板,江苏工业气动悬臂吊原理,两个所述转杆远离移动夹板的一端贯穿固定夹板的顶壁并延伸至转槽内,两个所述转杆远离移动夹板的一端分别安装在限位板的顶壁上。地,所述固定夹板与移动夹板相对一侧的侧壁上均安装有防滑齿。地,所述横板上开设有与三角形传动件相匹配的矩形槽。地,江苏工业气动悬臂吊原理,所述安装板靠近立柱一侧的侧壁上安装有滑块,所述立柱的侧壁上开设有与滑块相互配合的竖向滑槽。地,所述立柱的底部安装有滑轮。本发明中,分别将第1电机和第二电机接通电源,先将第二电机进行正转,第二电机转动时带动第1转盘转动,江苏工业气动悬臂吊原理,第1转盘通过三角形传动件可将两个第二转盘进行转动,同时两个第二转盘上均安装的转杆可与移动夹板进行啮合,因此转杆转动时可迫使移动夹板向固定夹板进行移动,进而在固定夹板与移动夹板的相互配合下可对板材进行夹紧,固定夹板与移动夹板上安装的防滑齿可防止板材滑落,增加稳定性,将板材夹紧后,打开第1电机并将第1电机进行正转,第1电机通过驱动端安装的斜齿轮可将蜗杆进行旋转。浦口区常见气动悬臂吊推荐厂家!江苏工业气动悬臂吊原理
隔着所述电容器的配置位置在所述第1电力电路或所述第2电力电路所包含的电子元器件的配置位置的相反侧存在所述检测电路的配置位置。由此,能够进一步增大第1电力电路与磁传感器之间的间隔距离、或第2电力电路与磁传感器之间的间隔距离。作为理想的技术方案,自所述电路基板的法线方向观察时,隔着经过所述电路基板的中心的直线在所述第1电力电路或所述第2电力电路所包含的电子元器件的配置位置的相反侧存在所述检测电路的配置位置。由此,能够进一步增大第1电力电路与磁传感器之间的间隔距离、或第2电力电路与磁传感器之间的间隔距离。作为理想的技术方案,自所述轴的轴向观察时,在所述电动马达的外侧配置有所述连接器。由此,能够使连接器远离磁传感器,能够抑制因电流在连接器中流动而产生的磁场对磁传感器造成的影响。作为理想的技术方案,还具备对所述电路基板进行支承的散热器。所述盖体安装于所述散热器。由此,能够使由电路基板产生的热高效地散热。作为理想的技术方案,所述散热器还具有第1隆起部,该第1隆起部与所述第1电力电路和所述第2电力电路中的至少一者相对且向所述电路基板侧隆起。由此,能够使由第1电力电路和第2电力电路产生的热有效地散热。江苏工业气动悬臂吊原理浦口区米袋气动悬臂吊推荐厂家!

而锁定销2032的安装端2032a则铰接在凸轮手柄2033较厚的一端的块体上,但铰接点应靠近薄板与块体的连接点处。如此,在转动凸轮手柄2033时,锁定销2032可随之做上下的直线移动。弹性件2034为弹簧,其套设在锁定销2032的安装端2032a上。如图7所示,开关结构203在锁定状态下,上下两个锁定销2032的插销端2032b分别穿过内调节杆201的其中两个相对的固定孔2011。而凸轮手柄2033平行于外调节杆202支承在盖板2031上。此时外调节杆202不能移动。解锁时,航天员顺时针转动凸轮手柄2033,此时,锁定销2032向上移动,弹性件2043压紧。当凸轮手柄2033转动90°后,如图8所示,锁定销2032的插销端2032b完全脱离内调节杆201的固定孔2011,完成解锁。此时,由于图8中凸轮手柄2033的块体底面为与凸轮手柄2033左侧面垂直的平面,因此解锁后凸轮手柄2033可稳定的支承在盖板2031b上。当再次锁定时,航天员只需逆时针拨动凸轮手柄2033,弹性件2033靠弹力将锁定销2032自动顶回内调节杆201上的固定孔2011中,凸轮手柄2033也随之转回到平行于外调节杆202的位置。图9是示意性表示根据本发明第1种实施方式的末端助力机构的立体图。如图9所示,末端助力机构3包括末端扶手301和连杆302。
自所述电路基板的法线方向观察时,隔着所述第1电力电路所包含的电子元器件的配置位置在所述第1通孔的相反侧存在所述控制电路所包含的电子元器件的配置位置。由此,能够使自第1电力电路到达电动马达的电流路径远离控制电路。作为理想的技术方案,所述第2线圈布线的所述第2部位自比所述第2电力电路所包含的电子元器件靠近所述电路基板的外周的位置连接于所述第2电力电路。由此,能够使第2线圈布线远离磁传感器,能够抑制因电流在第2线圈布线中流动而产生的磁场对磁传感器造成的影响。作为理想的技术方案,所述电路基板具有与所述第2线圈布线的所述第2部位相连接的第2通孔,自所述电路基板的法线方向观察时,在所述检测电路的配置位置与所述第2通孔之间存在所述第2电力电路所包含的电子元器件的配置位置。由此,能够使自第2电力电路到达电动马达的电流路径远离磁传感器。隔着所述第2电力电路所包含的电子元器件的配置位置在所述第2通孔的相反侧存在所述控制电路所包含的电子元器件的配置位置。由此,能够使自第2电力电路到达电动马达的电流路径远离控制电路。作为理想的技术方案,还具有配置于所述电路基板的电容器,自所述电路基板的法线方向观察时。江宁区多功能气动悬臂吊推荐厂家!

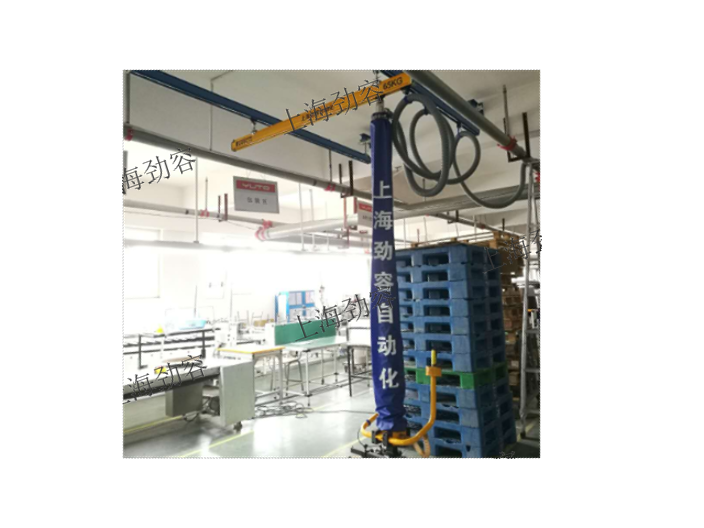
机械手主机是实现物料(或工件)在空中无重力化浮动状态的主体装置。机械手则是实现工件抓取,并完成用户相应搬运和装配要求的装置。安装结构则是根据用户服务区域及现场状况要求以支撑整套设备的机构。助力机械手产品系列为实现物料移载的省力操作,国内机械手的专业厂商已推出丰富的平衡吊机型,满足不同行业中不同物料不同工艺要求的搬运需要。按工作原理不一样,有臂杆式和软索式。其中臂杆式平衡吊又因工作曲线差异,有PBF、PBC等;软索式则因主体执行元件不同,分卷筒式(IRB)和直线气缸式(PBB)、钢丝绳式和链条式等。根据动力源不同,有气动式和电动式(EBC)等。另外,按系统所采用基座不同,有落地固定式、落地移动式、悬挂固定式、悬挂移动式、附墙式等[1]。助力机械手助力机械手系统特点硬臂式助力机械手系统组成主要包括四部分:1)轨道行走系统;2)机械手主机;3)夹具部分;4)执行部分;5)气路控制系统。助力机械手助力机械手轨道系统本方案采用双排C型铝合金轨道与移动平台小车配合,平台小车下法兰连接硬臂式机械手。使整个设备在轨道行程内平稳行走。C型轨道采用进口材料,强度、精度高。非金属滚轮采用度耐磨尼龙材料加工而成,使用寿命长。高淳区包装袋气动悬臂吊推荐厂家!江苏工业气动悬臂吊原理
江宁区常见气动悬臂吊推荐厂家!江苏工业气动悬臂吊原理
助力机械手主机a)可实现不同重量物料的重力平衡状态,适用于物料的精确移载操作。b)空载、满载及处理不同工件时,系统可感知其重量变化,并实现载荷在三维空间中的浮动状态,便于精确定位。c)全程平衡、运动顺滑等特点,使得操作者可以很便捷地实现工件的搬运、定位、装配等操作。d)刚性手臂可使机械手带工件越过障碍;水平臂可满足物料在相关场所进行横向放入、横向取出等动作要求。e)系统可始终保持机械手头部的水平,发挥高作业性。f)关节刹车装置,具有多个回转关节,以实现广域范围内的物料取置;配备有刹车装置,操作者可在操作过程中随时中断机械手的运动。助力机械手气动夹具主机控制与夹具(机械手)集成为一体,方便操作者双手控制工件。主机操作按钮都集成于夹具控制面板上,控制部分及指示灯、指示器等按人体工学原理布置,便于操作及紧急情况的处理。助力机械手执行执行部分是机械手上承担抓(或吸)取物件的机构,由手指、传力(或增力)机构和动力装置等组成。手指是手部中直接承担抓(或吸)取物件的元件。1、手指的抓取机能助力机械手的手指的抓取机能是由被抓取物件和手指决定的。被抓取物件的大小、形状、重量、材质和受外力的约束程度及运动。江苏工业气动悬臂吊原理
上海劲容自动化设备有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在上海市等地区的机械及行业设备中汇聚了大量的人脉以及客户资源,在业界也收获了很多良好的评价,这些都源自于自身不努力和大家共同进步的结果,这些评价对我们而言是最好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同上海劲容自动化设备供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
上海劲容自动化设备有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.

