企业免费推广平台

上海劲容自动化设备有限公司气管吸吊机|助力机械手|真空吊具|轨道交通
138****4765
本实用新型涉及机械设备技术领域,具体为一种气动助力机械手。背景技术:助力机械手,江阴米袋搬运机械手哪家有,又称机械手、平衡吊、平衡助力器,是一种新颖的、用于物料搬运及安装时省力操作的助力设备。它巧妙地应用力的平衡原理,使操作者对重物进行相应的推拉,就可在空间内平衡移动定位。无需熟练的点动操作,操作者用手推拉重物,就可以把重物正确地放到空间中的任何位置。但是目前机械加工中所使用的助力机械手并不能很好的满足重物移动的需求,存在着稳定性差,移动的范围小,移动不够准确,适用性差,重物的固定不够牢固,危险性较大的问题。针对上述问题,在原有助力机械手的基础上进行创新设计。技术实现要素:本实用新型的目的在于提供一种气动助力机械手,以解决上述背景技术中提出稳定性差,移动的范围小,移动不够准确,适用性差,重物的固定不够牢固,危险性较差的问题,江阴米袋搬运机械手哪家有。为实现上述目的,本实用新型提供如下技术方案:一种气动助力机械手,包括电动机、气缸,江阴米袋搬运机械手哪家有、配重块和机械手,所述电动机的右侧设置有立柱,且立柱的底部安装有固定底座,所述立柱的外侧固定有控制面板,所述气缸的内侧连接有储气罐,所述立柱的右侧设置有液压缸,所述立柱的上方安装有固定卡槽。栖霞区粉尘搬运机械手推荐厂家!江阴米袋搬运机械手哪家有
该设计方便工作人员在X、Y、Z轴将机械手位置快速调节,工作人员需要调节机械手使用角度时按下转动按钮,蓄电池11将电能传送至微电机13,微电机13带动固定杆转动,固定杆带动第二固定块10和凹型手臂座8转动,当凹型手臂座8旋转至合适角度时松开转动按钮,提高了本实用新型的适用范围。在昏暗的环境下工作人员按下照明按钮,蓄电池11将电能传送至照明灯17,该设计方便工作人员在昏暗的环境下快速观察搬运物品的位置,工作人员在搬运物品过程中根据搬运物品的不同规格进行调节,按下伸缩按钮,微型电动伸缩带动活动臂16向左或向右移动,该设计方便工作人员根据不同规格的搬运物品进行电动固定,提高了本实用新型的搬运稳定性。以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。江阴米袋搬运机械手哪家有六合区常见搬运机械手推荐厂家!

从而实现了铁板的自动转运和码垛。本机械手采用电磁铁吸板910取代了传统机械手中的抓爪,简化了对铁板抓取的控制,方便了铁板的吸取和堆放。参照图2所示,所述控制显示单元600还包括漏电检测单元650、定时计数单元660和数据存储单元670,所述漏电检测单元650、定时计数单元660和数据存储单元670的信号输出端分别与单片机610的信号输入端连接。漏电检测单元650可以自动检测本系统的漏电状态,保护系统的安全运行;定时计数单元660可以自动对搬运的货物进行计数并反馈至单片机610,较后存储在数据存储单元670中。以上所述为本实用新型的较佳实施例而已,但本实用新型不应局限于该实施例和附图所公开的内容,所以凡是不脱离本实用新型所公开的精神下完成的等效或修改,都落入本实用新型保护的范围。
具体实施方式下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例只只是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。请参阅图1,本实用新型提供一种技术方案:一种气动助力机械手,包括固定底座1、电动机2、控制面板3、气缸4、储气罐5、配重块6、固定卡槽7、转动盘8、横臂9、固定接头10、液压缸11、立柱12、机械手13、调节手轮14、吸盘15和吸头16,电动机2的右侧设置有立柱12,立柱12的上半部分为升降杆,且升降范围为0-2m,且立柱12的底部安装有固定底座1,立柱12的外侧固定有控制面板3,气缸4的内侧连接有储气罐5,立柱12的右侧设置有液压缸11,液压缸11与横臂9、立柱12之间均安装有固定连接件,立柱12的上方安装有固定卡槽7,且固定卡槽7的内侧连接有转动盘8,配重块6的右侧设置有转动盘8,配重块6和转动盘8的中心为同一水平线,且转动盘8的右侧固定有横臂9,机械手13通过固定接头10与横臂9相互连接,机械手13的下方连接有调节手轮14,机械手13为可旋转装置。栖霞区室内深加工搬运机械手推荐厂家!
搬运机器人【transferrobot】是可以进行自动化搬运作业的工业机器人。较早的搬运机器人出现在1960年的美国,Versatran和Unimate两种机器人第1次用于搬运作业。搬运作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,减轻了人类繁重的体力劳动。世界上使用的搬运机器人逾10万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。部分发达国家已制定出人工搬运的较大限度,超过限度的必须由搬运机器人来完成。搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。它的优点是可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势。雨花台区工业搬运机械手推荐厂家!江阴米袋搬运机械手哪家有
雨花台区米袋搬运机械手推荐厂家!江阴米袋搬运机械手哪家有
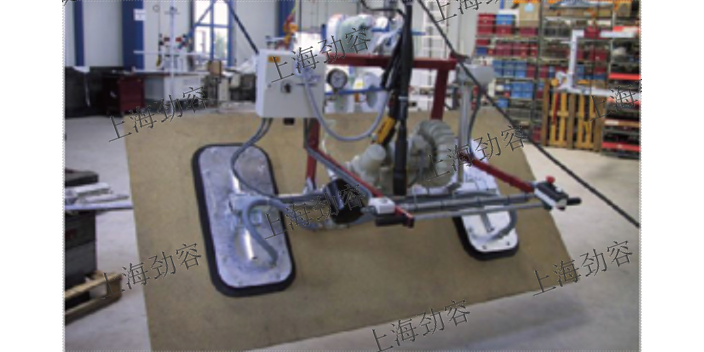
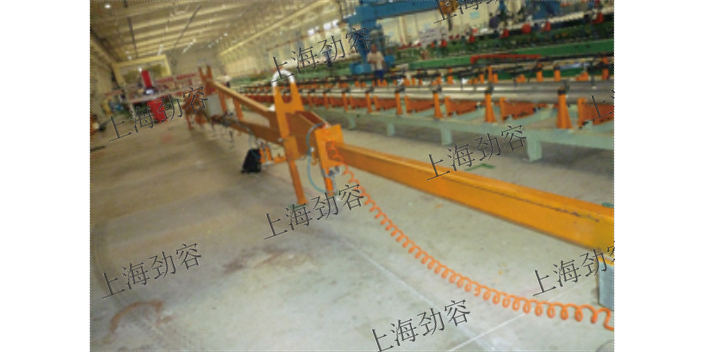
机械手主机是实现物料(或工件)在空中无重力化浮动状态的主体装置。机械手则是实现工件抓取,并完成用户相应搬运和装配要求的装置。安装结构则是根据用户服务区域及现场状况要求以支撑整套设备的机构。助力机械手产品系列为实现物料移载的省力操作,国内机械手的专业厂商已推出丰富的平衡吊机型,满足不同行业中不同物料不同工艺要求的搬运需要。按工作原理不一样,有臂杆式和软索式。其中臂杆式平衡吊又因工作曲线差异,有PBF、PBC等;软索式则因主体执行元件不同,分卷筒式(IRB)和直线气缸式(PBB)、钢丝绳式和链条式等。根据动力源不同,有气动式和电动式(EBC)等。另外,按系统所采用基座不同,有落地固定式、落地移动式、悬挂固定式、悬挂移动式、附墙式等[1]。助力机械手助力机械手系统特点硬臂式助力机械手系统组成主要包括四部分:1)轨道行走系统;2)机械手主机;3)夹具部分;4)执行部分;5)气路控制系统。助力机械手助力机械手轨道系统本方案采用双排C型铝合金轨道与移动平台小车配合,平台小车下法兰连接硬臂式机械手。使整个设备在轨道行程内平稳行走。C型轨道采用进口材料,强度、精度高。非金属滚轮采用度耐磨尼龙材料加工而成,使用寿命长。江阴米袋搬运机械手哪家有
上海劲容自动化设备有限公司是一家从事气管吸吊机,助力机械手,真空吊具,轨道交通研发、生产、销售及售后的生产型企业。公司坐落在上海市金山区亭林镇松隐南星村3016号1楼45室,成立于2009-03-17。公司通过创新型可持续发展为重心理念,以客户满意为重要标准。上海劲容自动化设备有限公目前推出了气管吸吊机,助力机械手,真空吊具,轨道交通等多款产品,已经和行业内多家企业建立合作伙伴关系,目前产品已经应用于多个领域。我们坚持技术创新,把握市场关键需求,以重心技术能力,助力机械及行业设备发展。上海劲容自动化设备有限公司每年将部分收入投入到气管吸吊机,助力机械手,真空吊具,轨道交通产品开发工作中,也为公司的技术创新和人材培养起到了很好的推动作用。公司在长期的生产运营中形成了一套完善的科技激励政策,以激励在技术研发、产品改进等。上海劲容自动化设备有限公司注重以人为本、团队合作的企业文化,通过保证气管吸吊机,助力机械手,真空吊具,轨道交通产品质量合格,以诚信经营、用户至上、价格合理来服务客户。建立一切以客户需求为前提的工作目标,真诚欢迎新老客户前来洽谈业务。
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
上海劲容自动化设备有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.