企业免费推广平台

上海劲容自动化设备有限公司气管吸吊机|助力机械手|真空吊具|轨道交通
138****4765
所述的夹紧上侧板固定块一29、夹紧下侧板固定块一30、夹紧上侧板固定块二31、夹紧上侧板固定块二32分别固定在上下分布的左右移动导向杆10上,且成间隔分布。夹紧松开气缸固定板6固定在夹紧上侧板固定块一29上,夹紧松开气缸9固定在夹紧松开气缸固定板6上;夹紧松开气缸卡座4固定在夹紧下侧板固定块一30上,夹紧松开气缸连接杆5固定在夹紧松开气缸9上并与紧松开气缸卡座4卡合;可调手柄7将夹紧上侧板20固定在夹紧上侧板固定块一29、夹紧上侧板固定块二31上,可调手柄7将夹紧下侧板21以及夹紧下侧板固定块一30,普陀区糖袋搬运机械手哪家有、夹紧下侧板固定块二32上,V型夹紧块22分别固定在夹紧上侧板20和夹紧下侧板21上,将套圈8夹紧,且可调手柄7带锁紧功能。夹紧上侧板20和夹紧下侧板21间有间距,夹紧上侧板20位于上方。齿轮转轴28固定左右移动连接块27上,齿轮轴承26固定在齿轮转轴28上,普陀区糖袋搬运机械手哪家有,齿轮34固定在齿轮轴承26上,普陀区糖袋搬运机械手哪家有,下齿条33固定在夹紧下侧板固定块一30和左右移动连接块27上并与齿轮34啮合,上齿条35固定在夹紧上侧板固定块二31和左右移动连接块27上并与齿轮34啮合。溧水区米袋搬运机械手推荐厂家!普陀区糖袋搬运机械手哪家有
包括万向轮1、底座2、防护板3、固定板5以及凹型手臂座8,万向轮1设有四组,且四组万向轮1安装在底座2下端,防护板3安装在底座2上端,防护板3中间开设有通孔,防护板3右侧装配有旋转电机14,旋转电机14左端面装配有丝杆12,丝杆12上装配有固定板5,固定板5内部前侧开设有通孔,且通孔内设有内螺纹,固定板5后侧装配有滑动杆4,固定板5内部后侧开设有滑动槽,滑动杆4贯穿滑动槽内部,固定板5上端面中间位置装配有电动推杆6,电动推杆6上端面装配有第1固定块7,第1固定块7内部装配有微电机13,微电机13上端面装配有固定杆,第1固定块7上侧设有第二固定块10,第二固定块10底部通过螺栓与固定杆相固定,第二固定块10后端面装配有伸缩套杆9,伸缩套杆9后端面装配有凹型手臂座8,凹型手臂座8左端面后侧装配有微型电动伸缩杆15,微型电动伸缩杆15右端面装配有活动臂16,底座2左端装配有蓄电池11,凹型手臂座8后端面中间位置镶嵌有照明灯17。底座2右端面装配有移动按钮,且移动按钮通过导线与蓄电池11相连接,旋转电机14通过导线与移动按钮相连接。第1固定块7右端装配有转动按钮,且转动按钮通过导线与蓄电池11相连接,微电机13通过导线与转动按钮相连接。新北区搬运机械手原理栖霞区常见搬运机械手推荐厂家!

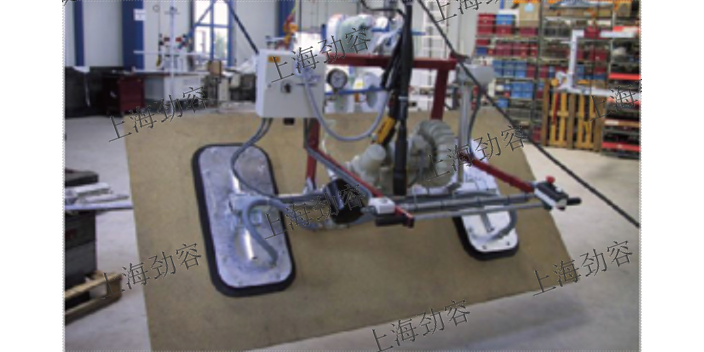
助力机械手主机a)可实现不同重量物料的重力平衡状态,适用于物料的精确移载操作。b)空载、满载及处理不同工件时,系统可感知其重量变化,并实现载荷在三维空间中的浮动状态,便于精确定位。c)全程平衡、运动顺滑等特点,使得操作者可以很便捷地实现工件的搬运、定位、装配等操作。d)刚性手臂可使机械手带工件越过障碍;水平臂可满足物料在相关场所进行横向放入、横向取出等动作要求。e)系统可始终保持机械手头部的水平,发挥高作业性。f)关节刹车装置,具有多个回转关节,以实现广域范围内的物料取置;配备有刹车装置,操作者可在操作过程中随时中断机械手的运动。助力机械手气动夹具主机控制与夹具(机械手)集成为一体,方便操作者双手控制工件。主机操作按钮都集成于夹具控制面板上,控制部分及指示灯、指示器等按人体工学原理布置,便于操作及紧急情况的处理。助力机械手执行执行部分是机械手上承担抓(或吸)取物件的机构,由手指、传力(或增力)机构和动力装置等组成。手指是手部中直接承担抓(或吸)取物件的元件。1、手指的抓取机能助力机械手的手指的抓取机能是由被抓取物件和手指决定的。被抓取物件的大小、形状、重量、材质和受外力的约束程度及运动。
本实用新型是一种搬运机械手,属于机械技术领域。背景技术:机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,在自动化生产设备中,利用机械手实现搬运非常普遍,且运用较为。现有的搬运机械手没有电动旋转结构,机械手无法快速调节,搬运效率不高,现有的搬运机械手没有固定结构,搬运机械手不方便搬运不同规格的物品,在昏暗的环境下工作人员不方便观察需要搬运物品的具置,现在急需一种搬运机械手来解决上述出现的问题。技术实现要素:针对现有技术存在的不足,本实用新型目的是提供一种搬运机械手,以解决上述背景技术中提出的问题,本实用新型结构合理,使用方便,稳定性高。为了实现上述目的,本实用新型是通过如下的技术方案来实现:一种搬运机械手,包括万向轮、底座、防护板、固定板以及凹型手臂座,所述万向轮设有四组,且四组万向轮安装在底座下端,所述防护板安装在底座上端,所述防护板中间开设有通孔,所述防护板右侧装配有旋转电机,所述旋转电机左端面装配有丝杆,所述丝杆上装配有固定板。江宁区室内深加工搬运机械手推荐厂家!

机械手可以完成许多工作,如搬物、装配、切割、喷染等等,应用非常5。在现代工业中,生产过程中的自动化已成为突出的主题。各行各业的自动化水平越来越高,现代化加工车间,常配有机械手,以提高生产效率,完成工人难以完成的或者危险的工作。可在机械工业中,加工、装配等生产很大程度上不是连续的。目前在我国机械手常用于完成的工作有:注塑工业中从模具中快速抓取制品并将制品传诵到下一个生产工序;机械手加工行业中用于取料、送料;浇铸行业中用于提取高温熔液等等。本文以能够实现这类工作的搬运机械手为研究对象。下面具体说明机械手在工业方面的应用。1、铸、锻、焊热处理等热加工方面模锻方面,国内大批量生产的3t、5t、10t模锻锤,其所配的转底炉,用两只机械手成一定角度布置早炉前,实现进出料自动化。上海柴油机厂、北京内燃机厂、洛阳拖拉机厂等已有较成熟的经验。2、在实现单机自动化方面各类半自动车床,有自动加紧、进刀、切削、退刀和松开的功能,单仍需人工上下料;装上机械手,可实现全自动化生产,一人看管多台机床。目前,机械手在这方面应用很多,如上海柴油机厂的曲拐自动车床和座圈自动车床机械手,大连第二车床厂的自动循环液压仿行车床机械手。雨花台区米袋搬运机械手推荐厂家!浦口区室内深加工搬运机械手哪家便宜
六合区牛皮袋搬运机械手推荐厂家!普陀区糖袋搬运机械手哪家有
机械手一般由执行机构、驱动系统、控制系统及检测装置三大部分组成,智能机械手还具有感觉系统和智能系统。工业搬运机械手是近几十年发展起来的一种高科技自动化生产设备,工业机械手的是工业机器人的一个重要分支,它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点。尤其体现了人的智能和适应性,机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。在工业上,自动控制系统有着的应用,如工业自动化机床控制,计算机系统,机器人等,而工业机器人是相对较新的电子设备,它正开始改变现代化工业面貌,实际的机器人由带有腕的主机身和机身端部的工具组成,同时也包括一个辅助动力系统。普陀区糖袋搬运机械手哪家有
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
上海劲容自动化设备有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.