企业免费推广平台

上海劲容自动化设备有限公司气管吸吊机|助力机械手|真空吊具|轨道交通
138****4765
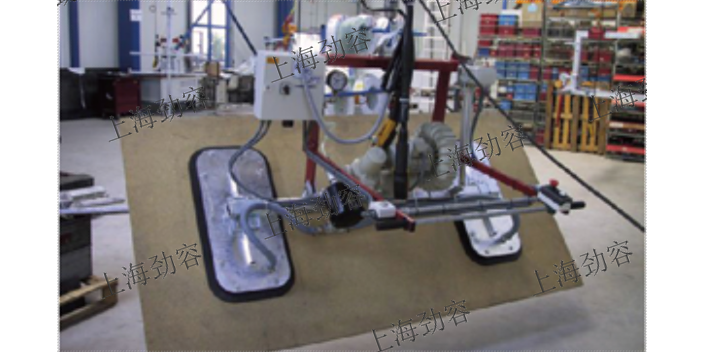
助力机械手,又称机械手、平衡吊、平衡助力器、手动移载机(以上说法并不专业但国内已经流行),是一种新颖的、用于物料搬运及安装时省力操作的助力设备。它巧妙地应用力的平衡原理,使操作者对重物进行相应的推拉,粉尘助力机械臂品牌,就可在空间内平衡移动定位。重物在提升或下降时形成浮动状态,靠气路保证零操作力(实际情况因为加工工艺及设计成本控制,操作力以小于3kg为判断标准)操作力受工件重量影响。无需熟练的点动操作,操作者用手推拉重物,就可以把重物正确地放到空间中的任何位置。助力机械手助力机械手应用由于具有无重力化、精确直观、操作便捷、安全高效等特点,“平衡吊”应用于现代工业中的物料移载、高频率搬运、精确定位、部件装配等场合。从接受原材料和物料开始,一直到加工、生产、保管及配送等物料流动过程中的每一个环节,平衡吊手动移载系统所发挥的作用是令人瞩目的。正确使用相应的物料移载方法和手段,对于各行业中,重物的移载、搬运现场的操作人员的健康,粉尘助力机械臂品牌,粉尘助力机械臂品牌、安全,进而其作业的合理性、劳动力的节省、生产效率的提高、产品品质的保障等多方面都有极大改善。助力机械手系统组成一套完整的助力机械手装备主要由三部分组成:平衡吊主机、抓取夹具。六合区包装袋助力机械臂推荐厂家!粉尘助力机械臂品牌

固定座2与滑块14之间的夹角处固定设有三角固定支架16,进一步的通过三角固定支架16固定固定座2与滑块14之间的位置同时加强其牢固性;滑轨13的两端分别设有限位支座17,进一步的通过限位支座17来限制滑块14的位移行程。在本实用新型的具体实施例中,夹紧装置9包括:第1限位块18、第1半环体19、第二半环体20以及连接螺栓21,第1半环体19与第二半环体20的两端分别通过连接螺栓21连接,第1半环体19的拱形一侧与第1限位块18固定连接,第1限位块18的另一侧与导向杆8固定连接,进一步的工件或者工具被固定于第1半环体19与第二半环体20之间并通过连接螺栓21固定,第1半环体19和第二半环体20的内部设有相互对置的弧形夹紧块191,第1半环体19和第二半环体20的外侧设有与弧形夹紧块191连接的夹紧气缸192,第1半环体19与第二半环体20夹住产品后,夹紧气缸192控制弧形夹紧块191夹紧产品,进一步提高了产品的夹紧牢固度。在本实用新型的具体实施例中,导向杆8远离夹紧装置9的一端设有第二限位块6,进一步的防止导向杆8滑出导向块7。进一步,两挡片10相互远离的一端均设有通孔22,每一通孔22内均套设有一弹性环体23,弹性环体23与连接带12固定连接。锡山区粉尘助力机械臂哪家的好江宁区牛皮袋助力机械臂推荐厂家!
立柱101的顶端设置有可围绕立柱101进行360°转动的主臂102,主臂102的另一端连接有可相对主臂102进行270°转动的L形次臂103,L形次臂103的另一端连接有竖直的夹具支架301。夹具支架301的一侧设置有翻转气缸座302,翻转气缸座302通过第1销轴303铰接有翻转气缸304。所述夹具支架301下端固定设置翻转机构3,翻转机构3包括与夹具支架301固定连接的翻转轴座305,翻转轴座305内设置有传动齿轮306,传动齿轮306通过翻转连杆307与翻转气缸302的气缸拉杆头相铰接,翻转连杆307与翻转气缸302的气缸拉杆头通过第二轴销308相连接。翻转轴座305内传动齿轮306的下方设置有轴承座309、轴承310,轴承310内设置有翻转转轴311,翻转转轴311上设有与传动齿轮306相啮合的翻转齿轮312。翻转转轴311的外侧设置气动夹具4,翻转轴座305上设置有用于挡止翻转转轴311的限位结构。夹具支架301上设有操作手柄5,操作手柄5上设置控制单元2,控制单元2上设有翻转控制阀201。通过操作翻转控制阀201可以控制翻转气缸302进行伸缩运动,进而气缸拉杆头可带动传动齿轮306转动,传动齿轮306带动翻转转轴311进行翻转,则气动夹具4可以随着翻转转轴311便捷地转动;限位结构可以有效地控制翻转转轴311转动的角度。
采用本下料助力机械手进行工件移送,自动化程度高、省力省时、工作效率高,而且运动平滑、结构刚性高,在移送过程中安全性能好,避免人工重复性劳动。参阅图1、图3,在本发明的一个实施例中,所述升降臂20包括:铰接架21,固定设置在所述立柱10的上端面,所述铰接架21上铰接有相互平行设置的第1支臂22和第二支臂23;托架24,所述第1支臂22、第二支臂23的另一端与托架24铰接,所述托架24的下端面与所述托臂30铰接;升降气缸25,所述第1支臂22上靠近所述铰接架21的一端延伸而出且与升降气缸25的上端固接,所述升降气缸25的下端固接在所述立柱10的侧壁上。上述技术方案的工作原理及有益效果:升降臂20的作用是在升降动力装置的驱动下,以杠杆结构为主体实现上下运送工件。其中升降动力装置为升降气缸25。升降气缸25为伸出状态时,推动第1支臂22的远端向下转动,在此动力作用下第二支臂23也随之转动并起到起到支撑结构刚性的作用。升降气缸25为缩回状态时,其它构件与上述运动相反。即通过升降气缸25实现升降臂20远端的上升与下降。在本发明的一个实施例中,所述托臂30呈l形结构,其水平边的长度大于竖直边的长度。雨花台区象鼻子助力机械臂推荐厂家!

为两端开口的筒状结构,外壁设有连接环62,所述连接环62中部开设有用于与所述吊杆40插接的固定插槽;头部端盖63,所述外筒体61上远离所述抓取架40的一端密封固接有头部端盖63,所述头部端盖63外侧固接有所述下料电机58,所述下料电机58的转轴57伸入所述外筒体61内部并从另一端延伸而出,所述外筒体61内部沿所述转轴57的延伸方向还依次内置有弹簧卡座64、振动滑套65、逆止锁套66;弹簧卡座64,固接于所述外筒体61的内壁,所述弹簧卡座64远离头部端盖63的端面设有第1弹簧容置槽;振动滑套65,通过滑键,所述振动滑套65朝向所述弹簧卡座64的端面设有第二弹簧容置槽,所述第1弹簧容置槽、第二弹簧容置槽;逆止锁套66,通过棘轮逆止同轴器68与所述转轴57转动连接,所述逆止锁套66的外壁与所述外筒体61的内壁相互分离;所述棘轮逆止同轴器68包括同轴固定在所述转轴57上的棘轮,所述棘爪,所述棘爪;所述振动滑套65、逆止锁套66的外周面以正螺旋面的形式接触配合;尾部端盖69,所述外筒体61一端密封设置头部端盖63,另一端密封设置尾部端盖69。所述逆止传动装置60上还设有用于锁定抓取架51的锁定装置70,所述锁定装置70包括:外进气孔71。江宁区室内深加工助力机械臂推荐厂家!粉尘助力机械臂品牌
雨花台区米袋助力机械臂推荐厂家!粉尘助力机械臂品牌
所述控制器电性连接有第1压力传感器和第二压力传感器,所述第1压力传感器设置在所述下卡爪上,所述第二压力传感器设置在所述吊杆上,所述控制器内含有一控制电路,所述控制电路包括:第1压力传感器,其引脚1连接有电压输入端,其引脚3接地,且引脚1、3之间还连接有电容c1,其引脚2依次串联有电阻r1、电感m1;第二压力传感器,其引脚1连接有电压输入端,其引脚3接地,且引脚1、3之间还连接有电容c2,其引脚2依次串联有电阻r2、电感m2;电容c3,其上端与电感m1的右端相连,下端与电容m2的右端相连;增益器t1,其正相输入端与r4串联,r4的另一端分别连接r6、r7,其负相输入端分别连接有电容c3的下端、电阻r3、电容c4,其输出端与r5一端相连;电容c4,其上端与所述增益器t1的负相输入端相连,其下端接地;电阻r5,其另一端依次串联有电阻r6、电阻r7,电阻r7的另一端接地;稳压二级管p1,其正极与r5的右端相连,其负极与稳压二极管p2的负极相连,稳压二极管p2的正极接地;频率变送器w1,其引脚1分别连接有电阻r8、二极管d2的正极,二极管d2的负极接地,电阻r8的另一端连接电源;其引脚2与稳压二级管p1的正极相连;其引脚3、4接地;其引脚5、9接电源输入端。粉尘助力机械臂品牌
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
上海劲容自动化设备有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.